Space Elevator Climbing Robot |
||||||||||
 I built the Space Elevator as a response to the challenge put forward
by Roger Gilbertson of the Robot Store
as a competition in the Robotics Society of America's
2002 Holiday Robot Games.
I built the Space Elevator as a response to the challenge put forward
by Roger Gilbertson of the Robot Store
as a competition in the Robotics Society of America's
2002 Holiday Robot Games.
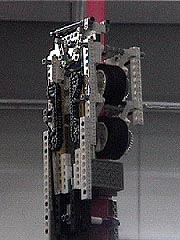
The challenge was to build a robot capable of climbing a thin ribbon of plastic tape to simulate the real-world practical application of a space elevator mechanism that could be used sometime in the future to carry people and equipment into orbit. The ribbon will be made from carbon nanotubes and will connect a movable platform on the Equator somewhere in the Pacific Ocean to a satellite just outside geo-stationary orbit. Orbiting outside the geo-stationary ring provides tension in the ribbon as the satellite tries to pull away from the Earth. You can learn more about the concept at HighLift Systems. The specific challenge that my Space Elevator robot was built to meet was detailed in "The Space Elevator Ribbon Climbing Robot Competition Rules " (PDF). An overview of the rules is as follows:
Since no-one else built a robot for the 2002 Holiday Games the competition became a demonstration, and my robot completed the tasks in 37 seconds including the mandatory 5 second pause. I found that the hardest task in designing this robot was actually balancing it perfectly about the centerline of the wheels - if the mechanism was even slightly off-balance, the ribbon would have a tendency to ride off to one side of the wheels and become bunched up. I was able to balance the robot by carefully moving the RCX and motors inwards or outwards. Since I was only just able to get my mechanism inside the 300x100x100mm envelope, I was not able to tackle the ground-based power issue, but I believe that solar panels powered by a 1 million candle-power flashlight should do the trick.
Click on the thumbnails below for video of the full ascent or just the pause section:
|
||||||||||
|
||||||||||

|
|
|||||||