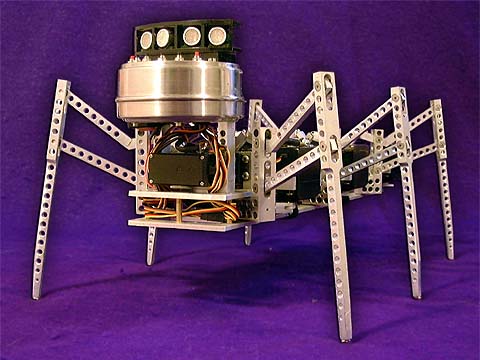
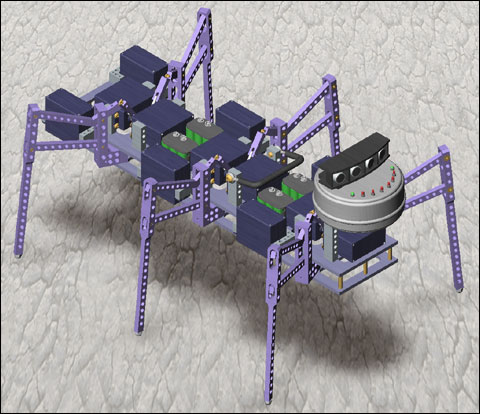
Ziggy is a hexapod (six-legged) robot designed and built from scratch by Nick
Donaldson. The robot is about two feet long and took Nick 9 months to build,
from original concept, through leg prototyping, 3D CAD design and manufacture.
Ziggy incorporates sonar obstacle avoidance and runs a fully autonomous program
allowing him to walk around avoiding objects.
 He is built around an OOPic II
microcontroller programmed in Java syntax code. The OOPic is great for a servo-controlled
robot as it has an oServo object built in that makes coding really simple. The
OOPic also allows the option of BASIC / C / Java code syntax which is nice as
most microcontrollers are programmed only in BASIC. The code listing for Ziggy's
program can be seen here. Ziggy uses 12
Hitec 700BB servos from
Servo City (best
servo prices and service on the web!), running off 24 NEXCell
NiMH AA batteries from Thomas
Distributing. Everything else on the robot was machined by Nick on a Mini
Mill. All raw materials and fasteners for Ziggy were purchased via McMaster-Carr's
excellent online catalog, which Nick highly recommends.
He is built around an OOPic II
microcontroller programmed in Java syntax code. The OOPic is great for a servo-controlled
robot as it has an oServo object built in that makes coding really simple. The
OOPic also allows the option of BASIC / C / Java code syntax which is nice as
most microcontrollers are programmed only in BASIC. The code listing for Ziggy's
program can be seen here. Ziggy uses 12
Hitec 700BB servos from
Servo City (best
servo prices and service on the web!), running off 24 NEXCell
NiMH AA batteries from Thomas
Distributing. Everything else on the robot was machined by Nick on a Mini
Mill. All raw materials and fasteners for Ziggy were purchased via McMaster-Carr's
excellent online catalog, which Nick highly recommends.
Ziggy has sonar
sensor 'eyes' from Devantech
installed. He is now fully autonomous, able to not only roam around avoiding
obstacles, but also interact with people around him. You should see Ziggy raise
a leg to mark his territory....